Princip a aplikace použití ultrazvukových senzorů v robotických vysavačích
- podíl
- Vydavatel
- Zoe
- Čas publikace
- 2024/8/17
Shrnutí
Princip a aplikace použití ultrazvukové technologie v robotickém vysavači k identifikaci koberců jsou podobné A-ultrazvukové diagnostice, která posuzuje materiál podlahy prostřednictvím ozvěn. Ve srovnání s detekcí cíle AI není ultrazvuková technologie omezena podmínkami, jako je osvětlení a barva.

Robotický vysavač 4.0 je nyní vybaven novým senzorem – ultrazvukovým senzorem, který řeší problém rozpoznávání mezi podlahami a koberci.
Co je ultrazvukový senzor?
Ultrazvukový senzor je zařízení, které převádí ultrazvukové signály na jiné energetické signály (obvykle elektrické signály). Ultrazvukové vlny jsou mechanické vlny s frekvencí vibrací vyšší než 20 kHz a vlnovou délkou přesahující slyšitelný rozsah lidského ucha (20 Hz ~ 20 kHz). Vyznačují se vysokou frekvencí, krátkou vlnovou délkou, minimální difrakcí, zvláště dobrou směrovostí a schopností šířit se směrově jako paprsky. V každodenním prostředí jsou téměř imunní vůči rušení s výjimkou koherentních vln a nepředstavují žádnou škodu pro člověka.
Jeho aplikace v lékařství, automobilovém průmyslu, dronech a dalších průmyslových odvětvích jsou velmi rozsáhlé.
Ultrazvukové senzory jsou také široce používány v autech a dronech.
Například couvací parkovací senzory.

Proč robotické vysavače potřebují ultrazvukové senzory?
Ultrazvukové senzory ve skutečnosti pomáhají robotickým vysavačům „identifikovat“ koberce. Jakmile je robotický vysavač vybaven ultrazvukovým senzorem, dokáže určit typ podlahového materiálu.
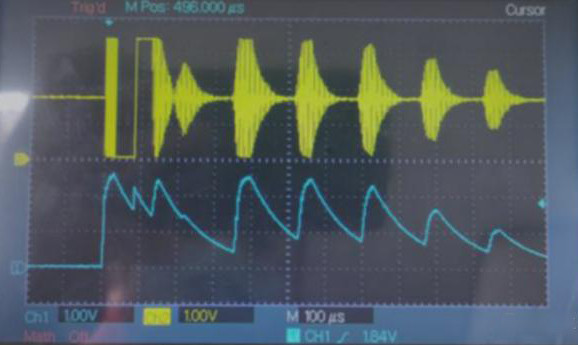
Když narazíte na hladkou podlahu, díky reflexnímu režimu jsou ultrazvukové vlny podlahou minimálně absorbovány a senzor detekuje nepřetržité „odrážení“ vln.
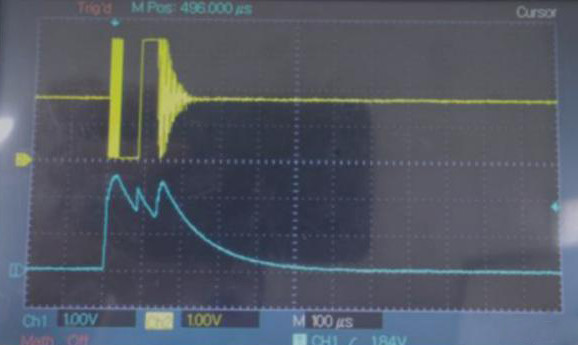
Když však robot narazí na koberec s vlákny, na základě nereflexního režimu jsou ultrazvukové vlny absorbovány materiály se silnými vlastnostmi pohlcování zvuku, jako je plsť, vlna, bavlna nebo houbová pěna. V tomto okamžiku robotický vysavač nepřijímá ozvěnu a rozpozná, že se blíží k oblasti pokryté kobercem.
Proč zvolit ultrazvukovou detekci před nejpokročilejšími algoritmy detekce objektů AI?
Pokud detekce objektů AI spoléhá na „vizi“, pak ultrazvukové senzory fungují spíše jako „dotyková“ detekce.
Skutečná účinnost detekce objektů AI závisí na mnoha faktorech, jako je osvětlení, barva koberce, úhel detekce, rychlost zpracování v reálném čase a rozlišení kamery.
Například v podmínkách se špatným osvětlením a tmavými koberci AI pravděpodobně nesprávně identifikuje koberec jako podlahu. Vzhledem k principu fungování ultrazvukových senzorů však nejsou těmito faktory ovlivněny, čímž se zabrání takovým chybným úsudkům.
Doporučené ultrazvukové senzory

Detekční rozsah: 20-120 mm Detekční rozsah: 20-200 mm Materiál: měď poniklování Typ připojení: 4kolíkový konektor M12

Detekční rozsah: 100-2000 mm, 200-4000 mm, 350-6000 mm Materiál: měď niklování, plastové fitinky Typ připojení: 5pinový konektor M12

Detekční rozsah: 30-300 mm, 50-500 mm, 60-1000 mm Materiál: měď niklování, plastové fitinky Typ připojení: 5pinový konektor M12

Detekční rozsah: 100-2000 mm, 150-3000 mm Materiál: plastové příslušenství, vyplněno epoxidovou pryskyřicí Typ připojení: 5pinový konektor M12